![[對話式AI-9] 2020 Chatbot Framework Comparison 聊天機器人框架對比](https://www.lionethan.com/wp-content/uploads/2020/10/1_0iSywp8IF6NtrHF3-gBGMg-825x510.jpeg)
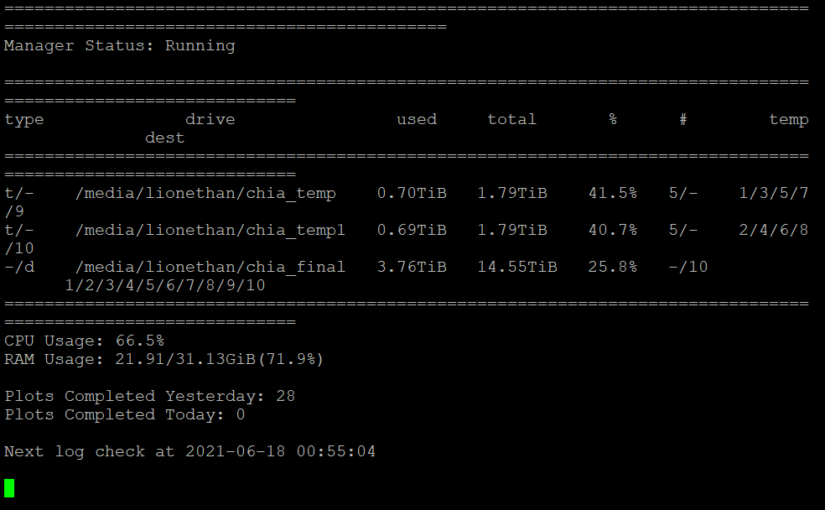
這是經過數個月的調查與更新,所做的2020年聊天機器人框架對比。本表整理了10個知名的Chatbot框架,幾乎涵蓋時下Chatbot所有的Feature;經過一輪基本的驗證後,針對模糊之處再深入使用,藉此得到詳盡的對比。10月做了一次修正與更新,為了將資料整合到部落格的AI專欄上,也克服網誌呈現表格的問題,在此分享給各位業界先進與同好。
| Type | Feature | Description | Microsoft | Xiao-i Robot | 小i機器人 | IBM | DYDU | SAP | Flow XO | Meya | Gupshup | Hubspot | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Dialogflow | AzureBot | iBot Enterprise / Pro | iBot International / Express | Watson | DYDU | Recast.ai | Flow XO | Meya | Gupshup | Hubspot | |||
| Operation & appearance | Code-free backend | 透過後端介面拖拉流程圖就能建立chatbot,不須寫程式 | √ | × | √ | √ | √ | √ | √ | √ | × | √ | √ |
| Structure & logic | Knowledge-independent assistant | knowledge(skills)的編輯與assistant的創建彼此獨立 | × | √ | × | × | √ | √ | √ | × | × | × | × |
| Bots collaboration | 可以定義一系列彼此knowledge不相關的bot,然後通過組合bot來構建一個assistant的整體輸出 | × | × | × | √ | × | √ | √ | √ | √ | √ | √ | |
| FAQ-based intent | 支援FAQ格式的intent與答案,而每個intent的答案是固定的 | √ | √ | √ | √ | × | × | × | × | × | × | × | |
| Multi-language | Multi-language | 支援多語言對話 | √ | √ | √ | √ | √ | √ | √ | × | √ | × | × |
| Auto-language detection | 系統自動偵測語言,使用者不需自行選擇 | √ | √ | × | √ | × | √ | √ | × | √ | × | × | |
| Pre-build content | Knowledge | 預置常用的一般或行業知識,允許客戶快速構建chatbot | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ |
| Knowledge edit | Intent -- intent conflict resolution | 利用AI技術偵測人工填寫intent/user samples時產生的錯誤和衝突 | × | × | √ | × | √ | × | √ | × | × | × | × |
| Intent -- utterance | 對某個intent編輯不同的問法(擴展問) | √ | √ | √ | √ | √ | √ | √ | × | × | × | √ | |
| Entity -- my entity | 可自行定義entity(例如通過同義詞) | √ | √ | √ | √ | √ | √ | √ | × | × | × | × | |
| 系統可自動推薦同義詞 | √ | × | × | √ | √ | × | × | × | × | × | |||
| Multi-turn Dialog | 若問句資訊不足,系統可以反問使用者(多輪對話) | √ | √ | √(ibot ui) | √ (scene) | √(5) | √ | √ | √ | √ | √ | √ | |
| × (workflow) | √(50) | ||||||||||||
| Dialog -- slots | 系統可自動擷取與填充槽位 | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | |
| Dialog -- disambiguation | 當使用者的問句匹配到dialog中2個以上的intent節點時,assistant會請使用者決定正確的intent | × | √ | × | √ | × | × | × | × | × | × | ||
| Dialog -- 意圖推薦 | 當使用者的問題超出服務範圍,或無法識別意圖時,系統可以推薦相關的意圖給使用者 | × | √ | √ | √ | × | √ | × | × | × | × | × | |
| Dialog -- multi slots filling | 對intent缺失的多個資訊,進行一次性的提問,讓使用者可以一次補充所有資訊,而非逐條詢問與回覆 | √ | √ | × | √ | × | × | × | × | × | × | ||
| Dialog -- multi reply | 對同一intent有多種回答,讓系統可以隨機選擇,產生更自然的對話效果 | √ | √ | √ | √ | × | √ | √ | × | √ | √ | ||
| Dialog -- Digression | 允許用戶在dialog中,進行話題(node)的切換,例如從某個流程節點跳轉到另一節點,並允許跳回等。 | × | √ | √ | × | √ | √ | √ | √ | √ | √ | × | |
| Dialog -- interruptions | 可讓使用者在對話中暫時討論不同的主題,然後再返回原來的主題 | × | √ | √ | × | × | √ | × | √ (quit keyword) | × | × | × | |
| Knowledge map | 顯示不同knowledge之間的關係和聯繫 | × | √ | √ | × | √ | × | × | × | × | × | ||
| Answer - variable | 提供特定參數,讓系統獲取相關資訊,如使用者名稱、IP、URL等內容,也可以直接用variable的形式添加在答案中。 | √ | √ | × | × | √ | √ | √ | √ | × | √ | ||
| Sentiment | 允許系統對正反及不同程度的情感狀態,做出對應的回應 | × | × | × | × | √ | √ | × | × | × | × | ||
| Import/export | 支援knowledge匯出及匯入 | √ | √ | √ | √ | √ | √ | × | × | × | × | × | |
| Dashboard | Analytics dashboard | 提供報表讓客戶進行數據分析 | √ | √ | √ | √ | √ (7 D) | √ | √ | √ (2 WK) | √ (30 D) | √ | √ |
| √ (30/90 D) | √ (3 M) | √ (increase) | |||||||||||
| Testing | Tester | 提供測次問句的各種工具 | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ |
| Batch test | 支援問句的批次測試 | × | √ | √ | × | × | × | × | × | × | × | ||
| Improve | Deep learning model | 支援深度類神經網路模型 | √ | √ | √ | √ | √ | × | √ | × | × | × | × |
| Active learning | 從日誌中收集待確認的對話,經客戶確認後學習到知識中 | √ | √ | √ | √ | √ | √ | √ | × | × | × | × | |
| Intent recommendation | 根據已有的對話數據推薦意圖,從而實現更快地訓練 | × | √ | √ | √ | √ | × | × | × | × | × | ||
| Integration | Custom plug-in | 可以客製化整合其他API | √ | √ | √ | × | √ | √ | √ | √ | √ | √ | × |
| Preview link | 可提供預覽chatbot的連結 | √ | √ | √ | × | √ | √ | √ | √ | × | × | × | |
| Service desk integrations | 支援無縫轉人工服務 | √ | √ | √ | × | √ | × | √ | √ | √ | √ | √ | |
| Versioning | 允許對assistant的編輯結果,進行版本控管 | √ | √ | × | √ | × | √ | × | × | × | × | ||
| Authorization | Access control | 可以允許添加訪問人員和管理相應的權限 | × | √ | √ | √ | × | √ | × | × | × | × | √ |
| Search skill | 支援透過搜索非結構化數據來擴展assistant的knowledge | √ | √ | √ | × | √ | × | × | × | × | × | × | |
| Data | Log data across instances | 將正式環境中的insights整合到開發環境中 | × | √ | √ | × | √ | √ | × | × | × | × | × |
| Data isolation | × | × | √ | √ | × | × | × | × | × | × | |||
| Service | SLA 99.9% | 服務等級協議達到99.9%的可用時間 | × | √ | × | × | √ | × | × | × | × | × | × |
| Mail subscription | 支援透過郵件訂閱comments等資料 | × | × | × | × | √ | × | × | × | × | × | ||
| Survey | 可設立問卷調查模板(對內部或外部調查) | × | × | √ | × | × | √ | × | × | × | × | × | |
| 對話預處理 | 通過預設的對話匹配規則,可快速自訂簡單的場景 | × | √ | × | × | √ | × | × | × | × | × | ||
| Matching strictness | 可調整匹配的閾值 | × | √ | × | × | × | √ | × | × | × | × | ||
| 定時任務 | 支援知識和詞的定時同步 | × | √ | × | × | √ | × | × | × | × | × | ||
| 前後綴處理 | 可自動忽略位於句首或句末的特定詞語或短句 | × | √ | × | × | × | × | × | × | × | |||
| 停用詞 | 可自動忽略句中任意位置的特定詞語 | × | √ | × | × | × | × | × | × | × | × | ||
| Table QA | 可動態載入結構化數據,並通過自然語言交互,轉換成SQL語句,對資料庫進行查詢 | × | √ | × | × | × | × | × | × | × | × | ||
| 質檢 | 自動分析交互日誌,將可能的錯誤應答的對話,提供給維運人員審核 | × | √ | × | × | × | × | × | × | × | |||
| 地區維度 | 根據使用者所在地區給出不同答覆 | × | √ | × | × | √ | × | × | × | × | × | ||
| 知識編輯鎖 | 一位編輯人員操作某個知識時,系統將鎖定該知識群組,使其他人員無法編輯,藉此防止衝突的產生 | × | √ | × | × | × | × | × | × | × | × |